高溫火焰法在熱電偶動(dòng)態(tài)特性分析
發(fā)布時(shí)間:2022-11-28
瀏覽次數(shù):
摘要:為研究
熱電偶溫度傳感器在靜態(tài)爆破試驗(yàn)中的響應(yīng)特性,采用高溫火焰法測(cè)得
K型熱電偶的時(shí)間常數(shù)為851.660ms;在熱電偶不滿足測(cè)試要求時(shí),通過(guò)系統(tǒng)逆建模的方法建立了熱電偶的動(dòng)態(tài)補(bǔ)償濾波器模型;加上動(dòng)態(tài)補(bǔ)償濾波器將熱電偶溫度傳感器在瞬態(tài)高溫火焰溫度場(chǎng)中的時(shí)間常數(shù)補(bǔ)償為93.583ms,達(dá)到了補(bǔ)償?shù)哪康摹?duì)補(bǔ)償前后熱電偶的幅頻特性進(jìn)行分析,結(jié)果表明,補(bǔ)償后熱電偶測(cè)溫系統(tǒng)的頻帶明顯拓寬。
進(jìn)行爆溫測(cè)試時(shí),瞬態(tài)高溫測(cè)試所得測(cè)試結(jié)果的準(zhǔn)確性與傳感器的響應(yīng)特性息息相關(guān)甲。在應(yīng)用廣泛的接觸式測(cè)溫中,熱電偶時(shí)間常數(shù)的大小反映其動(dòng)態(tài)特性的優(yōu)劣問(wèn)。常見(jiàn)的用于時(shí)間常數(shù)測(cè)試的經(jīng)典方法有水浴測(cè)試法、熱風(fēng)洞測(cè)試法和瞬時(shí)電加熱測(cè)試法。熱電偶溫度傳感器的響應(yīng)特性因其所處測(cè)溫環(huán)境的不同而差別極大6,若仍采用常規(guī)的測(cè)試方法,由于溫度場(chǎng)不同,所得時(shí)間常數(shù)就不能真實(shí)反映傳感器在靜爆場(chǎng)中的響應(yīng)特性。
采用高溫火焰法,在實(shí)驗(yàn)室現(xiàn)有技術(shù)條件下研究傳感器的動(dòng)態(tài)響應(yīng)特性的,并以此為基礎(chǔ),針對(duì)目前熱電偶的動(dòng)態(tài)響應(yīng)特性無(wú)法滿足爆溫測(cè)試需求的問(wèn)題[8],設(shè)計(jì)了熱電偶的動(dòng)態(tài)補(bǔ)償濾波器模型,以改善其在高溫火焰場(chǎng)中的響應(yīng)特性。
1熱電偶的時(shí)間常數(shù)
熱電偶的階躍響應(yīng)表達(dá)式為

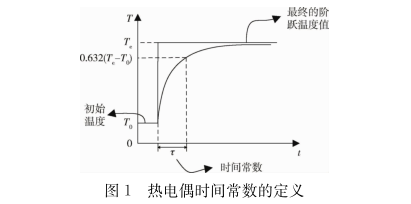
式中:T為指示溫度;T0為初始溫度;Te為最終的階躍溫度值;t為時(shí)間;τ為時(shí)間常數(shù)。
式(1)中,當(dāng)t=τ時(shí),可得:

由式(2)可知,時(shí)間常數(shù)就是T與T0之差達(dá)到溫度階躍值(Te-T0)的63.2%時(shí)所對(duì)應(yīng)的時(shí)刻與初始溫度T0所對(duì)應(yīng)時(shí)刻的時(shí)間差,時(shí)間常數(shù)的定義,如圖1所示。
在實(shí)驗(yàn)研究或工程應(yīng)用中,對(duì)熱電偶進(jìn)行分析時(shí),都是在忽略熱傳導(dǎo)、熱輻射及其內(nèi)部溫度分布的理想條件下進(jìn)行的,其能量方程為

式中:ρ、c分別為組成熱電偶金屬的密度、比熱容;V為熱電偶熱端熱結(jié)點(diǎn)的體積;T為熱電偶測(cè)量端的瞬時(shí)溫度值;h為導(dǎo)熱系數(shù),可因熱電偶測(cè)溫環(huán)境的不同而不同;S為熱節(jié)點(diǎn)表面流體薄膜的面積;Tg為被測(cè)氣流的真實(shí)溫度。ρ、c、V、S均為傳感器的物理參數(shù),與測(cè)溫環(huán)境無(wú)關(guān)。由式(3)可得:
式(5)表明,時(shí)間常數(shù)不僅與其物理參數(shù)有關(guān),還與其所在溫度場(chǎng)環(huán)境有關(guān)。
2火焰場(chǎng)中熱電偶的時(shí)間常數(shù)
采用一種高溫火焰法探究溫度傳感器在高溫火焰場(chǎng)中的動(dòng)態(tài)特性。
一直以來(lái),在接觸式的爆溫測(cè)試中,應(yīng)用最為廣泛的是標(biāo)準(zhǔn)的K型熱電偶和非標(biāo)準(zhǔn)的鎢錸合金熱電偶([0。目前,雖然一些新研制出來(lái)的鎢錸合金熱電偶在響應(yīng)速度和測(cè)溫范圍方面優(yōu)勢(shì)明顯,但不宜在空氣或含氧環(huán)境中使用。選用K型細(xì)裸線熱電偶進(jìn)行研究,所選熱電偶的基本指標(biāo)參數(shù)見(jiàn)表1。

2.1高溫火焰法
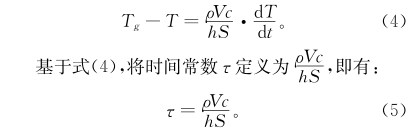
為了得到與熱電偶在爆溫測(cè)試中表現(xiàn)最為接近的傳感器的動(dòng)態(tài)響應(yīng)特性,所采用的高溫火焰法的具體工作流程如圖2所示。
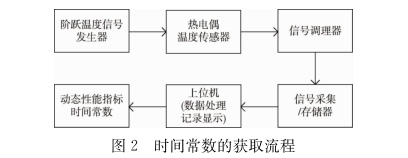
圖2中,溫度階躍信號(hào)發(fā)生器是高溫火焰法最具特色的部分,由縱向直線導(dǎo)軌、豎向大擋板、快速吸附片、帶豎向小擋板和滑輪滑塊、快速?gòu)椛溲b置(圖中未畫(huà)出)、高溫火焰溫度源及隔熱箱組成。高溫火焰測(cè)試法測(cè)試系統(tǒng)的結(jié)構(gòu)如圖3所示。
圖3中,與火焰溫度源法[11的不同之處在于,在高溫火焰溫度源_上加了隔熱箱,并在隔熱箱上留有1個(gè)與熱電偶在同一水平線上的用于熱電偶自由出人的開(kāi)口。這樣改進(jìn)后,不僅可以使高溫火焰溫度源免受外界因素的擾動(dòng),而且還可以有效避免高溫火焰溫度源在時(shí)間常數(shù)測(cè)試過(guò)程中的熱量散失,從而保證用于產(chǎn)生階躍溫度信號(hào)的高溫火焰溫度源的穩(wěn)定性,使高溫火焰法更具有實(shí)用價(jià)值。
2.2時(shí)間常數(shù)的測(cè)試
采用高溫火焰法的實(shí)驗(yàn)步驟如下:
1)備好縱向直線導(dǎo)軌,并將其固定在實(shí)驗(yàn)臺(tái)上,然后備好載有熱電偶的滑塊。
2)調(diào)整高溫火焰溫度源的位置,使被測(cè)傳感器快速滑動(dòng)與大擋板吸合的時(shí)刻偶結(jié)能完全置于火焰中。
3)按照?qǐng)D3所示連接時(shí)間常數(shù)測(cè)試系統(tǒng)。
4)確認(rèn)各部分之間的連接方式無(wú)誤后,對(duì)測(cè)試系統(tǒng)通電,并在計(jì)算機(jī)界面進(jìn)行相關(guān)參數(shù)的設(shè)置。
5)打開(kāi)高溫火焰發(fā)生器的開(kāi)關(guān),啟動(dòng)彈射儀,使被研究熱電偶以很快的速度滑動(dòng),當(dāng)偶結(jié)完全置于火焰中時(shí),熱電偶便可受到溫度階躍信號(hào)的激勵(lì)。
6)在上位機(jī)界面讀取實(shí)驗(yàn)結(jié)果。
由實(shí)驗(yàn)結(jié)果讀取被測(cè)熱電偶的時(shí)間常數(shù),熱電偶的溫度階躍響應(yīng)如圖4所示。
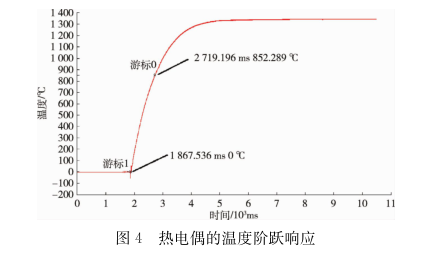
圖4中,游標(biāo)1指示的是溫度階躍信號(hào)發(fā)生時(shí),熱電偶初始溫度為0的時(shí)刻,即1867.536ms;游標(biāo)0指示的采集到的溫度值1348.558℃與初始溫度值的差值達(dá)到采集到的穩(wěn)態(tài)值的63.2%,即852.289℃,所對(duì)應(yīng)的時(shí)刻為2719.196ms,則此時(shí)被測(cè)熱電偶的時(shí)間常數(shù)是851.660ms。
由時(shí)間常數(shù)分析式(4)和式(5)可得:
由式(9)可知,當(dāng)熱電偶輸人為階躍信號(hào)時(shí),其動(dòng)態(tài)響應(yīng)誤差會(huì)隨著時(shí)間的增大而減小。且當(dāng)t>3τ時(shí),熱電偶的測(cè)量值基本接近真實(shí)值。可認(rèn)為當(dāng)熱電偶的響應(yīng)隨時(shí)間不再有變化時(shí),所測(cè)溫度與環(huán)境溫度之和即為火焰的真實(shí)溫度。
2.3驗(yàn)證實(shí)驗(yàn)
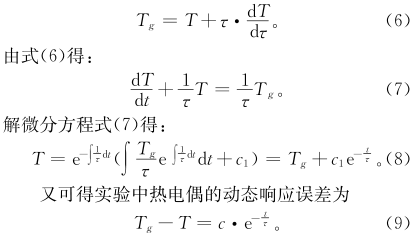
為了驗(yàn)證高溫火焰法中溫度階躍信號(hào)發(fā)生器的有效性,構(gòu)建了1個(gè)階躍信號(hào),輸人給1個(gè)τ為851.660ms的一階響應(yīng)系統(tǒng),將其階躍響應(yīng)與時(shí)間常數(shù)為851.660ms的實(shí)際的階躍信號(hào)進(jìn)行比較,結(jié)果如圖5所示。
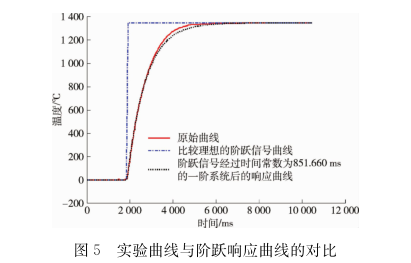
圖5顯示,將1個(gè)階躍信號(hào)輸入給τ為851.660ms的一階響應(yīng)系統(tǒng),其響應(yīng)曲線與高溫火焰法中熱電偶溫度傳感器的響應(yīng)曲線非常接近。因此,該高溫火焰時(shí)間常數(shù)測(cè)試法產(chǎn)生的激勵(lì)是1個(gè)比較理想的溫度階躍信號(hào)。
3熱電偶動(dòng)態(tài)特性補(bǔ)償數(shù)
由于被研究熱電偶在瞬態(tài)高溫火焰溫度場(chǎng)中的時(shí)間常數(shù)高達(dá)851.660ms,-方面,這樣的響應(yīng)速度顯然無(wú)法滿足爆溫測(cè)試的要求;另一方面,也很難通過(guò)優(yōu)化細(xì)裸線熱電偶的物理參數(shù)來(lái)提高其動(dòng)態(tài)特性,因此,需采取其他合適的方法來(lái)對(duì)熱電偶的響應(yīng)特性進(jìn)行改善。
3.1逆建模法
所謂系統(tǒng)逆建模法,就是直接利用被研究熱電偶溫度傳感器時(shí)間常數(shù)測(cè)試時(shí)的輸人、輸出信號(hào)來(lái)建立傳感器逆模型的一種新型建模方法[13],其基本原理如圖6所示。
3.2熱電偶響應(yīng)特性的補(bǔ)償
《中華人民共和國(guó)國(guó)家計(jì)量技術(shù)規(guī)范》中明確指出,給傳感器加溫度階躍量時(shí),產(chǎn)生階躍平臺(tái)所用的時(shí)間須不大于被研究測(cè)溫器件時(shí)間常數(shù)的10%14]。傳感器的時(shí)間常數(shù)為851.660ms,因此,建立熱電偶的補(bǔ)償模型時(shí),可構(gòu)建1個(gè),上升時(shí)間80ms的斜坡信號(hào)作為傳感器補(bǔ)償模型的輸出量;另外,可將所得的熱電偶的溫度階躍響應(yīng)作為補(bǔ)償器模型的輸人量。
在眾多常用的優(yōu)化算法中,由于粒子群優(yōu)化算法(PSO)獨(dú)具特色,不僅算法簡(jiǎn)單、收斂性好,而且搜索速度快、全局搜索能力也強(qiáng),所以,應(yīng)用甚廣。
3.2.1粒子群優(yōu)化算法(PSO).
采用PSO尋找最佳解時(shí),將潛在的解視為D維空間中的1個(gè)點(diǎn),即粒子(Particle)。建立補(bǔ)償器模型的過(guò)程中,首先設(shè)模型的系數(shù)矩陣為PSO算法中的粒子;然后設(shè)D維空間中的粒子數(shù)為m。粒子的特點(diǎn)如下。
3.2.1粒子群優(yōu)化算法(PSO)
采用PSO尋找最佳解時(shí),將潛在的解視為D維空間中的1個(gè)點(diǎn),即粒子(Particle)。建立補(bǔ)償器模型的過(guò)程中,首先設(shè)模型的系數(shù)矩陣為PSO算法中的粒子;然后設(shè)D維空間中的粒子數(shù)為m。粒子的特點(diǎn)如下。
3)每個(gè)粒子都有1個(gè)個(gè)體適應(yīng)度值,粒子間正是通過(guò)比較該值來(lái)更新自身的最佳位置。
4)所有的粒子組成了1個(gè)種群,叫粒子群。粒子群有1個(gè)群體的適應(yīng)度值,同理,粒子會(huì)將自己上次所得的適應(yīng)度值與其當(dāng)前位置的適應(yīng)度值相比較,若群體的當(dāng)前值更優(yōu),將其對(duì)應(yīng)的位置作為種群當(dāng)前的最佳位置,即Pg。
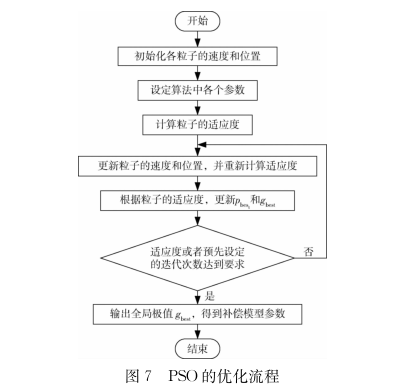
令Pg=(pg1+pg2,.,pgD)。PSO的整個(gè)優(yōu)化流程如圖7所示。
3.2.2熱電偶動(dòng)態(tài)補(bǔ)償模型的建立
將采用高溫火焰法所得溫度階躍響應(yīng)和設(shè)定的斜坡信號(hào)分別作為補(bǔ)償模型的輸入量和輸出量,設(shè)定粒子數(shù)和搜索空間的維數(shù)后,隨機(jī)地初始化每個(gè)粒子的速度和位置,便可按照?qǐng)D7的規(guī)律在MAT-LAB中實(shí)現(xiàn)PSO。尋優(yōu)完成后,基于PSO的動(dòng)態(tài)特性補(bǔ)償結(jié)果如圖8所示。
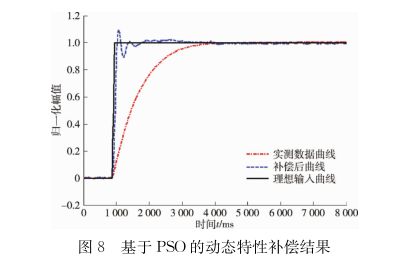
圖8顯示,經(jīng)過(guò)補(bǔ)償后,被研究熱電偶的動(dòng)態(tài)響應(yīng)特性的時(shí)間常數(shù)值減小了很多,為93.583ms,響應(yīng)速度得到了大幅度提升。
3.2.3熱電偶測(cè)溫系統(tǒng)的幅頻特性分析
在被研究溫度傳感器的時(shí)域指標(biāo)得到大幅度地提升的基礎(chǔ),上,對(duì)時(shí)間常數(shù)為851.660ms的原始一階系統(tǒng)的幅頻特性、所建立的動(dòng)態(tài)補(bǔ)償模型的幅頻特性及兩者串聯(lián)后的整體幅頻特性分別在MAT-LAB環(huán)境中進(jìn)行分析,補(bǔ)償前后的幅頻特性曲線如圖9所示。
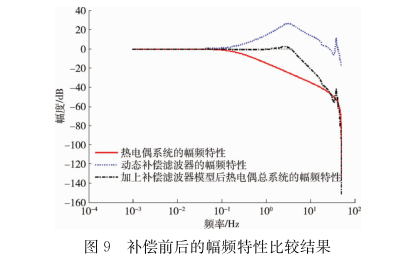
圖9顯示,加上動(dòng)態(tài)補(bǔ)償模型后,通過(guò)濾波器后的頻率衰減情況為在接近零軸中間隆起時(shí)的曲線對(duì)應(yīng)的頻率增大,測(cè)溫系統(tǒng)的頻帶得到了很大程度的拓寬。
4結(jié)語(yǔ)
采用高溫火焰法得到了被研究細(xì)裸線熱電偶的時(shí)間常數(shù),并以此為基礎(chǔ),建立了傳感器的補(bǔ)償模型,拓寬了測(cè)溫系統(tǒng)的頻帶,有效地改善了其在瞬態(tài)高溫火焰場(chǎng)中的響應(yīng)特性,基本滿足了爆溫測(cè)試的需求,所提出的高溫火焰法對(duì)評(píng)估爆溫測(cè)試中熱電偶的真實(shí)動(dòng)態(tài)響應(yīng)特性有一定的實(shí)用價(jià)值。

